Теорія проти практики: як проєктують електроніку безпілотників для роботи в екстремальних умовах
У лабораторних умовах майже будь-яка електроніка працює ідеально. На тестовому стенді при стабільних 22°C, з лабораторним блоком живлення та відсутністю вібрацій навіть найдешевша плата покаже заявлені у специфікації (datasheet) характеристики. Але щойно ця плата опиняється всередині безпілотної платформи — під палючим сонцем або на морозі, піддаючись жорстким вібраціям від моторів та стрибкам напруги — «паперові» цифри втрачають будь-який сенс.
З інженерної точки зору, надійність системи — це не здатність працювати у штатному режимі, а здатність виживати під час пікових, непередбачуваних навантажень. Давайте розберемося, як саме проєктуються компоненти, що не підводять у реальних умовах, і чому інженерний контроль на кожному етапі є критичним.
Теплова динаміка: куди подіти зайві градуси
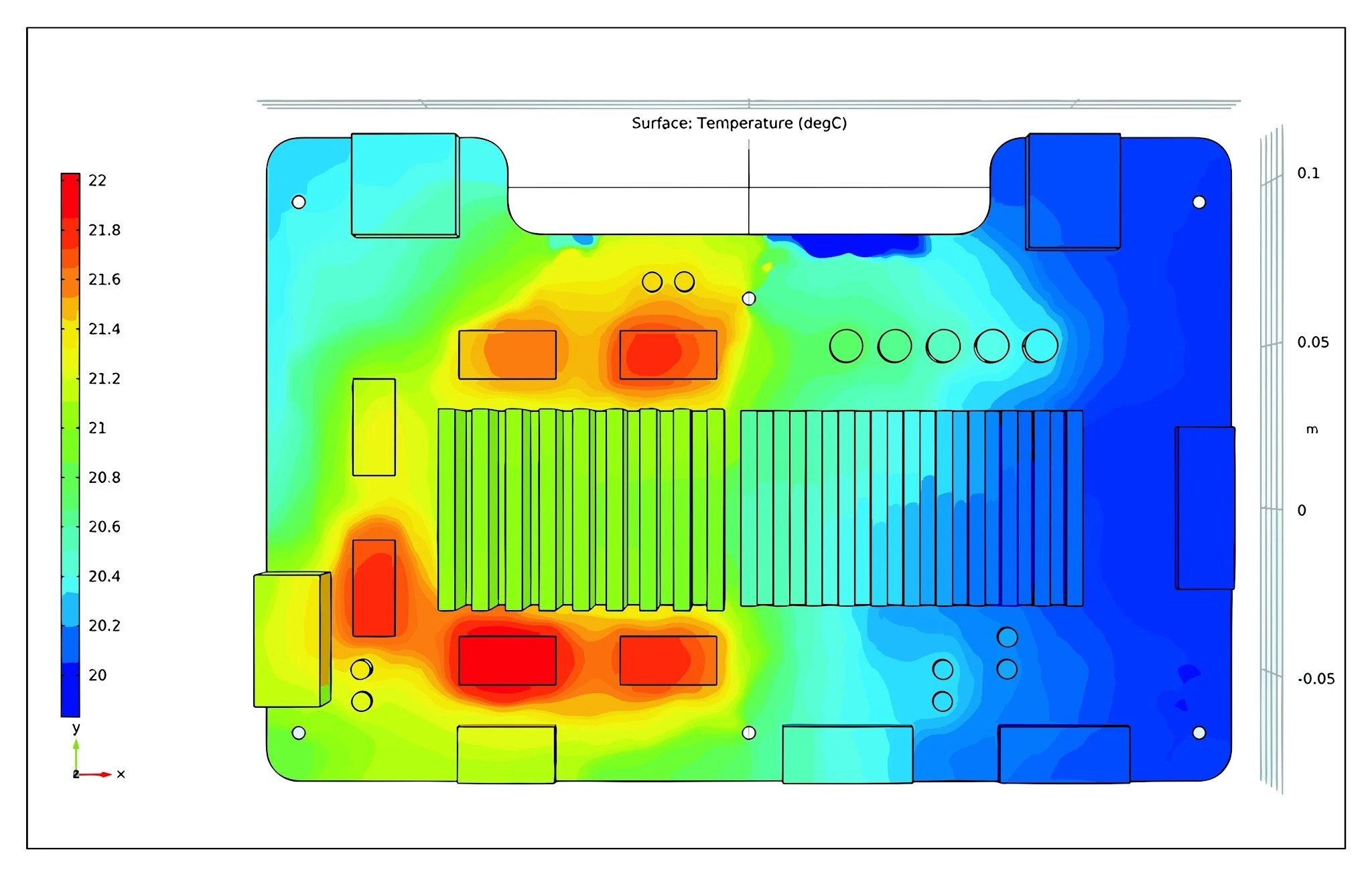
Найбільший ворог будь-якої електроніки під навантаженням — це тепло. Коли безпілотник виконує динамічний маневр або бореться з вітром, регулятори обертів (ESC) пропускають через себе десятки, а іноді й сотні ампер струму.
Ключовими елементами тут є транзистори (MOSFET). Під час проходження великого струму вони неминуче нагріваються. Якщо тепло не відводити, внутрішній опір транзистора зростає, він починає грітися ще сильніше, і виникає ефект «теплового розгону», який закінчується вигорянням компонента.
Як це вирішується на етапі проєктування:
- Якісна елементна база: Інженери обирають транзистори з мінімальним показником опору у відкритому стані (RDS(on)). Чим нижчий цей опір, тим менше тепла виділяється.
- Друкована плата (PCB) як радіатор: У дешевих платах використовується тонкий шар міді. У професійних рішеннях проєктувальники закладають багатошарові плати з потовщеною міддю (наприклад, 2 oz або 4 oz). Сама структура плати починає працювати як ефективний радіатор, рівномірно розподіляючи тепло від транзисторів по всій площі.
Енергетичний голод: архітектура стабільного живлення
Стрибки напруги — ще одна неочевидна, але критична проблема. Уявіть, що платформа різко набирає висоту. Мотори миттєво «висмоктують» енергію з акумулятора, через що напруга в усій системі різко падає (Voltage Sag).
Якщо плата розподілу живлення (PDB) спроєктована без запасу міцності, це падіння дійде до польотного контролера (FC) або відеопередавача. Для мікропроцесора падіння живлення навіть на частку секунди означає примусове перезавантаження. У повітрі це дорівнює втраті апарата.
Інженерний підхід до живлення:
Справжня надійність закладається через використання імпульсних DC-DC перетворювачів промислового класу та масиву якісних конденсаторів з низьким еквівалентним послідовним опором (Low ESR). Вони працюють як локальні «резервуари» енергії: коли мотори спричиняють просадку напруги, конденсатори миттєво віддають накопичений заряд, згладжуючи стрибок і забезпечуючи чутливу електроніку ідеально рівним живленням.
Механічна витривалість: коли вібрація руйнує контакти
Безпілотник — це джерело постійної високочастотної вібрації. Якщо плата зібрана з порушенням температурного режиму пайки, всередині паяльних з’єднань утворюються мікротріщини. З часом під дією вібрацій та температурного розширення (вдень нагрілося, вночі охололо) ці тріщини розростаються. Контакт зникає прямо під час польоту.
Щоб цьому запобігти, недостатньо просто купити хороші деталі. Потрібен жорсткий контроль виробництва. Наприклад, використання рентген-контролю (X-Ray) для перевірки BGA-компонентів (де контакти сховані під корпусом мікросхеми) та обов’язкове нанесення конформного покриття. Спеціальний лак фіксує дрібні SMD-компоненти, захищаючи їх не лише від вологи та пилу, але й від механічного стресу.
Єдиний стек: чому сумісність важливіша за характеристики
Навіть якщо ви візьмете ідеальний польотний контролер, найкращий ESC та найнадійнішу систему живлення від різних брендів, у вас немає гарантії, що вони працюватимуть стабільно разом. У моменти пікових навантажень будь-яка неузгодженість протоколів передачі даних або різна архітектура «землі» на платах призведе до помилок (desync) та електромагнітних наведень.
Саме тому сучасний стандарт надійності — це власне R&D та створення закритих екосистем. Компанії з глибокою експертизою, такі як FT Systems, проєктують свої рішення у форматі єдиного стеку.
Що це дає на практиці:
- Апаратна сумісність: Схемотехніка FC, ESC та PDB розробляється паралельно. Вони ідеально узгоджені за робочими напругами та опором сигнальних ліній.
- Відсутність «вузьких місць»: Інженери точно знають можливості кожного вузла і не допускають ситуацій, коли, наприклад, ESC може пропустити струм, який спалить плату живлення.
- Комплексне тестування: Зібраний стек тестується як єдиний організм. Його піддають вібраціям, заморожують і нагрівають, імітуючи реальні умови експлуатації, щоб виявити конфлікти ще до серійного виробництва.
Підсумок
Надійність безпілотної платформи під навантаженням — це не магія і не випадковість. Це результат скрупульозного інженерного розрахунку. Топові характеристики окремих мікросхем не мають значення, якщо плата не здатна відвести тепло, а живлення просідає при першому ж маневрі. Справжня стабільність у реальних умовах досягається лише тоді, коли виробник повністю контролює цикл: від підбору елементної бази та власної розробки архітектури до жорсткого стендового тестування сумісних компонентів у межах одного стеку.
